For the testing of these e-drives, we implemented the data acquisition solution and evaluation for a large German automotive supplier. Power consumption and speed are relevant to evaluating the efficiency of electromechanical systems. Since the motors are permanently installed into vehicle body parts, often only the electrical current and voltage signals are all that’s available for quality testing.
Using the Current Signal to Determine Motor Speed
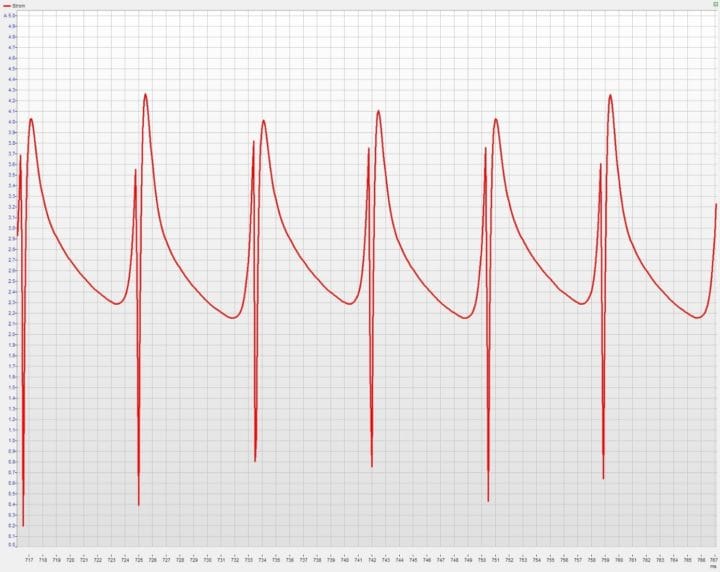
In a classic DC motor, the mechanical commutator leads to a brief drop in the current curve when poles are reversed. Depending on the design and number of poles of the motor, the quantity of current dips corresponds to one revolution. This model is also reflected in the current curve of brushless motors with electronic commutation.
Figure 1 demonstrates the current curve of a motor over time. The current pictured here was measured with a Q.bloxx XL A107 I/O module and a shunt. The current drops visible in this example occur during commutation at intervals of 8.4 ms.
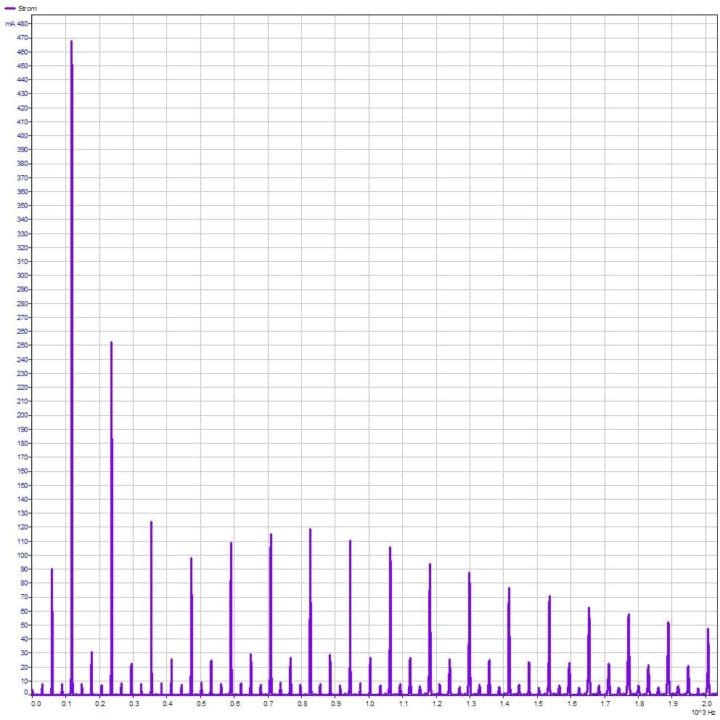
Accordingly, the spectrum of the current curve (Figure 2) shows its maximum occurs at 119 Hz. Assuming 3 commutations per revolution, this corresponds to a speed of 2380 revolutions per minute.
The spectrum can be performed both online and offline by Q.series X controllers. In this way, the engine speed can be determined continuously and live on the test bench using the current signal. The necessary configuration is performed in just a few steps.
Quick-and-Easy Configuration on the Test Bench
The FFT function of the Q.series X controller offers, among other things, the possibility to evaluate the maximum of a spectrum within a selected frequency band by magnitude and frequency. The frequency of the maximum corresponds to the fundamental wave and is divided by the number of poles and multiplied by 60 to give the speed in revolutions per minute (rpm). Also, the current is used to detect whether the motor is in operation and whether the electrical power can be calculated.
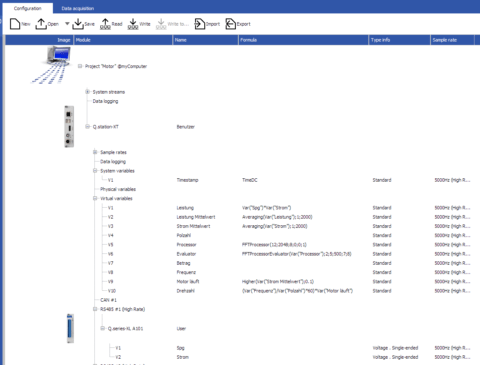
This edge computing allows the motor speed to be determined without a separate computer.
Depending on the test bench configuration, data can now be transferred to the system control, e.g., via EtherCAT or visualized within GI.bench on the test bench PC or over the local network.
Simply Powerful Visualization
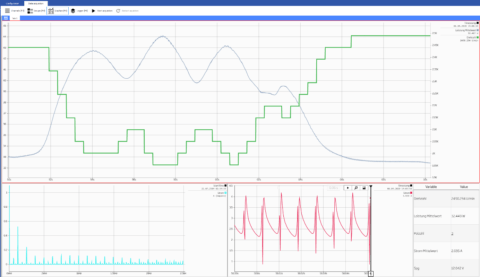
With GI.bench, you can create custom dashboards for visualization. Figure 4 shows the speed and power in the upper chart. When the motor is loaded, the speed decreases (green curve), while the power consumed increases (grey curve). Also, the current spectrum (blue), the current trace (red), and the parameters (table) are displayed numerically in this interface.
For references, demo programs and questions you can always contact us at info@gantner-instruments.com.
More articles
EIS-Testing Webinar
Gantner Instruments, in collaboration with FLW, is excited to invite you to a free webinar on Tuesday, September 24th, at 11:00 AM EST: "Unlocking the Full Potential of Batteries, Fuel Cells, and Electrolyzers with EIS Testing."
Read more...Precise Measurement of High Voltage Systems
In high-voltage environments, the precision and reliability of measurement systems are crucial for safety, compliance, and performance optimization. High-voltage testing and measurement are integral to developing and producing equipment and systems that operate under high-voltage conditions, such as power transmission systems, high-voltage motors and generators, and components for electric vehicles. Gantner Instruments' Q.series X A12x modules (e.g., Q.series X A128) offer sophisticated solutions to address the unique challenges of high-voltage measurements.
Read more...Changing demands within Automotive Testing – Webinar
Want to know more about changing demands within Automotive Testing?
Read more...Daily Meals for 300 Children
After establishing our company last year in India, we became aware of the Sri Karpagavalli Vidyalays Middle School, a school for 300 girls and boys ages 5 through 14. Not only do these children, coming primarily from the slums, lack educational material, they frequently do not even have elementary necessities like food.
Read more...